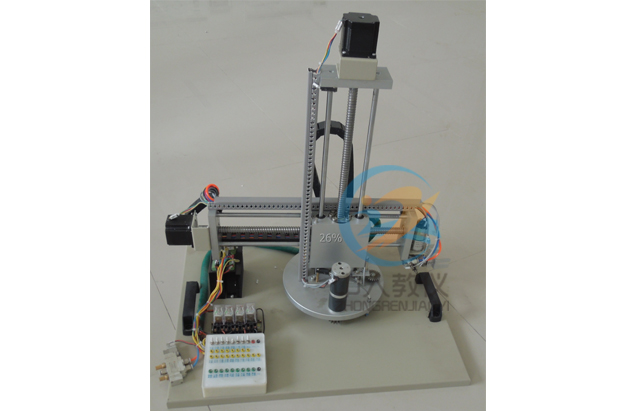
氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型
聯(lián)系方式見右側(cè)懸浮框
【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】是根據(jù)客戶需求而寫的,非常具有代表性,在客戶搜索【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】時(shí),都能通過我們來了解相關(guān)資訊,而且【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】在客戶有需求時(shí)提供參考意見。
概述
plc控制四自由度機(jī)械手實(shí)物模型為三維定位系統(tǒng)的微縮,使用可編程控制器控制,在X、Y、Z軸三個(gè)方向上準(zhǔn)確地驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)進(jìn)行物品搬運(yùn)、移動(dòng)的成品,完善的執(zhí)行機(jī)構(gòu)可實(shí)現(xiàn)現(xiàn)代物流系統(tǒng)中全部動(dòng)作過程。配套三菱FX1N-40MT 。實(shí)訓(xùn)裝置由鋁合金導(dǎo)軌式實(shí)訓(xùn)臺(tái)、機(jī)械手裝置、控制系統(tǒng)等組成。實(shí)訓(xùn)裝置為坐標(biāo)式機(jī)械手,可完成機(jī)械手旋轉(zhuǎn)、手臂垂直上下、手臂水平移動(dòng),手爪旋轉(zhuǎn)四個(gè)自由度的位置精確控制。同時(shí)配置晶體管式PLC可編程控制器,用于對(duì)整個(gè)機(jī)械手進(jìn)行復(fù)雜地位置控制。該實(shí)訓(xùn)裝置的控制部分均采用標(biāo)準(zhǔn)式模塊設(shè)計(jì),可分為電源模塊、PLC模塊、系統(tǒng)控制模塊。包含了專業(yè)中所涉及的諸如步進(jìn)電機(jī)驅(qū)動(dòng)、機(jī)械傳動(dòng)、氣動(dòng)、可編程控制器、、等多項(xiàng)技術(shù),給學(xué)生提供了一個(gè)綜合實(shí)訓(xùn)環(huán)境,使學(xué)生學(xué)過的諸多單科專業(yè)知識(shí)在這里得到全面認(rèn)識(shí)、綜合訓(xùn)練和相互提升。
1、技術(shù)參數(shù)
電源:單相AC220V、50Hz功率:<200W
尺寸:不小于600*400*500mm
2、設(shè)備結(jié)構(gòu):
實(shí)訓(xùn)裝置臺(tái)架為金屬結(jié)構(gòu),實(shí)訓(xùn)考核裝置PLC模塊的I/O 端子、各常用模塊與PLC的連接端子,均與安全插座連接,使用帶安全插頭的導(dǎo)線進(jìn)行電路連接;各指令開關(guān)、光電開關(guān)、傳感器和指示元件的電路,則通過端子排進(jìn)行連接。插拔線連接電路與端子連接電路相結(jié)合,既保證學(xué)生基本技能的訓(xùn)練、形成和鞏固,又保證電路連接的快速、安全和可靠。3、設(shè)備特點(diǎn):
1、手動(dòng)/自動(dòng)控制模式,針對(duì)硬件檢測及程序校驗(yàn)。2、開放的執(zhí)行機(jī)構(gòu),可根據(jù)不同的控制方案編程,構(gòu)成不同的執(zhí)行系統(tǒng),適應(yīng)不同層次的人員進(jìn)行PLC學(xué)習(xí)和編程。也可作為課題設(shè)計(jì)或研究使用。
3、產(chǎn)品為開放式,整體機(jī)械構(gòu)造清晰可見。
4、安全保護(hù)措施:實(shí)訓(xùn)臺(tái)桌面采用高絕緣、高強(qiáng)度、耐高溫的高密度板。具有接地保護(hù)、漏電保護(hù)功能,安全性符合相關(guān)的國標(biāo)標(biāo)準(zhǔn)。采用高絕緣的安全型插座及帶絕緣護(hù)套的高強(qiáng)度安全型實(shí)驗(yàn)導(dǎo)線。
5、機(jī)械手的橫軸和豎軸的機(jī)械傳動(dòng)采用高精密的滾珠絲桿,高精密的光桿導(dǎo)軌和直線軸承,配以先進(jìn)地機(jī)械設(shè)計(jì)、精密的機(jī)械加工及裝配,可使機(jī)械手臂非常平穩(wěn)地進(jìn)行垂直和水平移動(dòng)和水平方向旋轉(zhuǎn)及精確位置控制。
6、采用選進(jìn)的步進(jìn)電機(jī)作為橫軸和豎軸的動(dòng)力源,可實(shí)現(xiàn)0.028度的細(xì)分,即每轉(zhuǎn)一圈需要12800步,滾珠絲行程為4mm,則手臂每步位移精度為0.0003125mm,步進(jìn)電機(jī)的正常單步角度為0.9,則手臂每步位移精度為0.01mm。
7、機(jī)械手臂和機(jī)械手爪水平方向旋轉(zhuǎn)采用高級(jí)減速直流電機(jī)傳動(dòng),可實(shí)現(xiàn)旋轉(zhuǎn)方向的精確位置控制。
8、機(jī)械手爪采用高精度氣動(dòng)式手爪、配置高級(jí)電磁位置開關(guān)及兩位三通電磁閥,可實(shí)現(xiàn)快速準(zhǔn)確地抓取和放開動(dòng)作。
9、采用晶體管式PLC可編程控制器作為控制主機(jī),配置傳感器,可實(shí)現(xiàn)PLC高級(jí)指令編程、光電傳感器的技術(shù)應(yīng)用。
10、機(jī)械手水平最大旋轉(zhuǎn)角度: 720度。
11、機(jī)械手爪采用高精度氣動(dòng)式手爪、配置高級(jí)電磁位置開關(guān)及兩位三通電磁閥,可實(shí)現(xiàn)快速準(zhǔn)確地抓取和放開動(dòng)作。
4、部分實(shí)訓(xùn)項(xiàng)目:
實(shí)驗(yàn)內(nèi)容
1、機(jī)械:裝置的機(jī)械安裝與位置調(diào)整;2、電氣:電器元件的布線,執(zhí)行電機(jī)的選用;
3、傳感器:微型光電開關(guān)的選擇與應(yīng)用;
4、PLC:PLC控制驅(qū)動(dòng)器的編程及應(yīng)用。
5、送料機(jī)構(gòu)控制實(shí)驗(yàn)
6、十字機(jī)械手點(diǎn)動(dòng)控制實(shí)驗(yàn)
7、十字機(jī)械手三維精準(zhǔn)定位實(shí)驗(yàn)
8、十字機(jī)械手取物體實(shí)驗(yàn)
9、十字機(jī)械手放物體實(shí)驗(yàn)
10、十字機(jī)械手單循環(huán)搬動(dòng)物體實(shí)驗(yàn)
主要配置(單臺(tái)):
| 名 稱 | 型 號(hào) | 數(shù)量 | 單 位 | |
| PLC主機(jī) | 三菱FX1N-40MT | 1 | 套 | |
| 三菱編程電纜 | USB-SC09 | 1 | 條 | |
| 步進(jìn)驅(qū)動(dòng)器 | ST-26H | 2 | 套 | |
| 步進(jìn)電機(jī) | F57 | 2 | 臺(tái) | |
| 絲杠 | 1604 | 2 | 根 | |
| 光桿 | Φ10 | 4 | 根 | |
| 氣爪 | MHZ2-16D | 1 | 個(gè) | |
| 直流減速電機(jī) | Φ37/24v轉(zhuǎn) | 2 | 個(gè) | |
| 按鈕 | Φ12 紅、綠 | 2 | 個(gè) | |
| 繼電器 | 24V 20A | 4 | 個(gè) | |
| 直流電源 | 24V 3A | 1 | 個(gè) | |
| 軟件 | 演示板原程序及三菱編程軟件 | 仿真教學(xué)軟件 | 1 | 套 |
| 工控組態(tài)軟件 | ||||
| 說明書 | 實(shí)驗(yàn)指導(dǎo)書 | 1 | 冊 | |
| 連接線 | 紅色 | 5 | 條 | |
| 黑色 | 5 | 條 | ||
| 綠線 | 10 | 條 | ||
| 黃線 | 10 | 條 | ||
如對(duì)本產(chǎn)品/文章:氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)有任何疑問請隨時(shí)聯(lián)系我們,我們將盡力為您提供最全的實(shí)訓(xùn)室建設(shè)方案和最優(yōu)質(zhì)的服務(wù)
本文關(guān)鍵詞:氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)
【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】是上海中人原創(chuàng),如果您在了解產(chǎn)品的過程中受到啟發(fā),想要咨詢相關(guān)設(shè)備的問題,我們將派專員為您解決疑問,或者您在閱讀【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】中有想不通的問題,也可以咨詢我們,我們將為您提供快速解決【氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型,機(jī)械手plc控制對(duì)象系統(tǒng)】問題的方案
這些是最新的
- 十字路口交通燈實(shí)物教學(xué)模型
- 氣動(dòng)機(jī)械手實(shí)訓(xùn)教學(xué)模型
- 變頻恒壓供水實(shí)物教學(xué)模型
- 五層電梯實(shí)訓(xùn)教學(xué)模型
- 物料分揀實(shí)訓(xùn)教學(xué)模型
- 小車運(yùn)動(dòng)控制系統(tǒng)實(shí)物教學(xué)模型
- 自動(dòng)往返控制實(shí)訓(xùn)實(shí)物模型
- 溫度·壓力檢測實(shí)訓(xùn)模型(模擬量實(shí)物)
- 立體倉庫實(shí)物教學(xué)模型
- 門禁控制系統(tǒng)實(shí)訓(xùn)模型
- 單容水箱液位對(duì)象系統(tǒng)(模擬量實(shí)物模型)
- 溫度控制實(shí)訓(xùn)教學(xué)模型
- PLC可編程控制器、變頻調(diào)速實(shí)驗(yàn)臺(tái)
- 可編程控制器、變頻調(diào)速、單片機(jī)綜合應(yīng)用實(shí)訓(xùn)
- plc與微機(jī)接口應(yīng)用綜合實(shí)訓(xùn)裝置
熱門關(guān)鍵詞

熱門排行
