

��ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�b�õČ��E�nj��T���Ñ���Q���y���}�ģ��dz����д����ԣ��ڿ͑��M�ЮaƷ�x��ǰ���҂�һ�㽨�h�Ñ��ȿ��¶�ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�b�õČ��E���@���܌��Ñ��x���зdz���Ď�����
һ�����ʂ�
���M�ж�ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ֮ǰ����Ҫ���ó�ֵĜʂ乤�������ȣ��W����Ҫ�˽⌍�Ļ���ԭ�������Ϥ��ܙCеϵ�y�����c�ͽM�Ϸ�ʽ����Σ��W����Ҫ�ʂ�Ì��������O����ߣ���Cе������ݽz�������ֵȡ�ͬ�r���W��߀��Ҫ��x���ָ�������˽⌍�E��ע����헡�
�������E
�Cе������J֪�c�x��
�ڌ����_ʼ�A�Σ��W����Ҫ�˽⌍��b�����ṩ�ĸ��N�Cе��������Q�����c����;���@Щ��������X݆���S���S�С��B�U�����K�ȣ�ÿ�N����������ض����\�����Ժ͑��È������W����Ҫ������������x����m������M�нM�Ϻʹ�ӡ�
�C�����½M���OӋ
���˽��˸��N�Cе����Ļ��A�ϣ��W����Ҫ�l�]����˼�S���OӋ����ͬ�ęC���\�ӽM�ϡ��W�����Ը����Լ����dȤ�������OӋ�������ض��\��܉�E���ܵęC�������@һ�^���У��W����Ҫ�C�Ͽ��]����ijߴ硢�\�ӷ������\�����Ե����أ��Ԍ��F��ѵ��\��Ч����
����{ԇ�C���\�ӽM��
����Ʉ��½M���OӋ�W����Ҫ���Ì���b���еęCе���������OӋ�ęC�����ڴ�^���У��W����Ҫע������İ��b�����B�ӷ�ʽ���_���C���ķ����ԺͿɿ��ԡ���ɴ�W����Ҫ���C���M���{ԇ���z��������Ƿ��܉��������������{���C�����\��܉�E���ٶȵȅ������ԝM���OӋҪ��
����ϵ�y�OӋ�c���
����əC���\�ӽM�ϵĴ�W����Ҫ�OӋ�ʹ�ӂ���ϵ�y�������C����������\�����ԣ��x����m�Ă��ӷ�ʽ�����X݆���ӡ������ӵȣ��͂���Ԫ�������X݆����݆�ȣ���Ȼ������Ԫ���c�C���B���������γ������Ă���ϵ�y�����@һ�^���У��W����Ҫ���]����Ч�ʡ��������Լ����b���{���ı����Ե����ء�
����ϵ�y�OӋ�c�{ԇ
���ˌ��F�C���ľ��_���ƺͅf�{�\�ӣ��W����Ҫ�OӋ���{ԇ����ϵ�y�������C����������\�����ԣ��x����m�Ŀ���������PLC����������Ƭ�C�ȣ��͂����������늂���������λ�_�P�ȣ���Ȼ�������Ƴ�������ÿ��ƅ�����ʹ�C�������A����܉�E���ٶ��M���\�ӡ����@һ�^���У��W����Ҫ���]���ƾ��ȡ�푑��ٶ��Լ���ȫ���o�����ء�
�C���{ԇ�c�����u��
��əC��������ϵ�y�Ϳ���ϵ�y���OӋ�c��ӺW����Ҫ��������ܙCеϵ�y�M�оC���{ԇ�������u����ͨ�^���H�\�к͜yԇ���z��ϵ�y�Ƿ��܉F�A�ڵ��\��܉�E���ٶȺ��ܡ�ͬ�r��ӛ����P�Č����ͽY�������\�Ӿ��ȡ������ԡ��ܺĵ�ָ�ˡ������u���Y������ϵ�y�M�б�Ҫ���{���̓�����
�Fꠅf���c����
���M�ж�ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�r���W�����ԷֽM�M�Ќ�ͨ�^�Fꠅf�����W�����Թ�ͬӑՓ�ͽ����OӋ˼·������ɺ͌�ͨ�^��W���ͽ��b���W�������،��Լ���˼·��֪�R�棬��߈F��������͜�ͨ�������ڈFꠅf���^���У��W�������_�ֹ����΄շ��䣬���e�O�����Լ����뷨�ͽ�ͬ�r���W��߀��ԓע�؈F�֮�g�Ĝ�ͨ�ͅf�{����ͬ��Q���}�Ϳ˷����y��
�����c���Y
��ɶ�ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�W����Ҫ������^���M�������Ϳ��Y���@һ���E�������팍�����w�{���Y�����������}�ͽ�Q�����ȡ�ͨ�^���Y���ͷ������W������얹����W֪�R������Լ��Č��`�����͌W�gˮƽ��ͬ�r���W��߀���Ԟ���ČW���͌��`�ṩ����ą����ͽ��b�����������Y�^���У��W����ע�ط�˼���u���Լ��ı��F�ͳɹ����ҳ�����֮̎���ƶ����MӋ�������⣬�W��߀������������Փ�ģ�������^�̺ͽY���ԕ�����ʽ�ʬF����������Լ��ČW�g���_������
����ע�����
���M�ж�ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�r���W����ע�ⰲȫ���}�����ȣ��W�������،��Ҏ�t�Ͳ������̣��_������^�̵İ�ȫ�ԡ���Σ��W����ʹ�ÙCе����r��С��֔�����������������wɢ���ˡ����⣬�W�����{ԇ�Cеϵ�y�Ϳ���ϵ�y�r�������^������������������C��ʧ�ػ�p�ġ���W���ڈFꠅf���Б��������õĜ�ͨ�ͅf�{����������Ҋ���ϻ�؟�β����_���a��ì�ܻ�_ͻ��
ͨ�^���ϲ��E�Č��`���о����W�����������˽��ܙCеϵ�y���½M���OӋ��ԭ���ͷ�����ͨ�^�l�]����˼�S�������`�͈Fꠅf���������W����������Լ��ęCе�OӋ�̈́���������ͬ�r��ͨ�^����^���е��^�졢�����Ϳ��Y���W���������B�Լ��Č��`�����͌W�gˮƽ����K���W�����@�Ì��F�Č��`����֪�R���䣬��δ���ČW�������춨�Ԍ��Ļ��A��
��������ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�b���ļ��g����
��ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�b�����g����
1. ��Ӗ�_
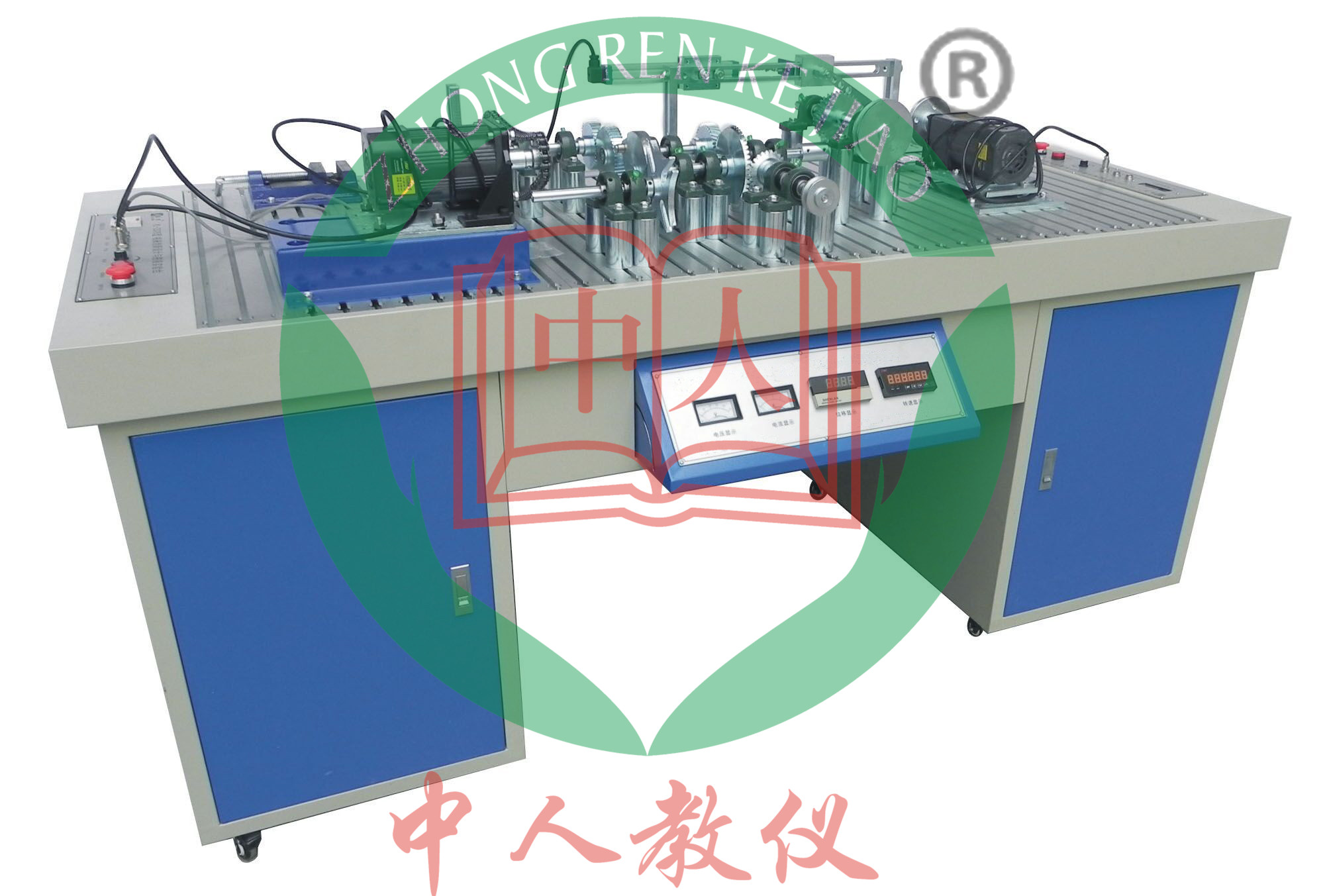
(1)��ܙCеϵ�y���½M�ϴ�ӾC�ό�Ӗ�b��,�Cеԭ�팍Ӗ�_�����F�|�p�Ӂ����ܼy���ܽY��,�_��鎧��T���β۵��X�Ͻ��ͲIJ������,�O���Ă�����(�p�ӽY��),���ڴ�Ō�Ӗ���ߺ��Y��
(2)ݔ���Դ:����������220V��10% 50Hz
(3)���γߴ�:1850mm��850mm��860mm
2. �����
(1)�F�|�p�Ӂ����ܼy���ܽY��,����������ɴ�Ō�Ӗ���,���O��4�����x܇���f��݆
(2)���γߴ�:860mm��600mm��1600mm
3. ����늙C
4. �Դ������
(1) �{����:�ṩ����늙C�{���Դ
(2) �����ɼ��ӿ�:��Ҫ�����Ƕȡ�λ�ơ��D�ٵȂ������ӿڼ�ͨӍ�ӿ�
(3) �O�������©늱��o,I��n ��30mA,�����r�g��0.1s,����10A
5. ������
(1) ���D���a��:�X�Ͻ���|,�ֶ�1024�}�_/�D
(2) ֱ��λ�Ƃ�����:�X�Ͻ��⚤,���� 200mm,�������Զ� 0.1%